



步驟一:?確定垃圾桶構(gòu)造

步驟二: 觀察圖片,分析垃圾桶的組成部分
智能垃圾桶我們要是實(shí)現(xiàn)的功能是人靠近的時(shí)候就自動(dòng)打開,我們要為其設(shè)計(jì)推開蓋子的結(jié)構(gòu),慣性的機(jī)械思維,我設(shè)計(jì)了兩種傳動(dòng)機(jī)構(gòu)來推開蓋子。
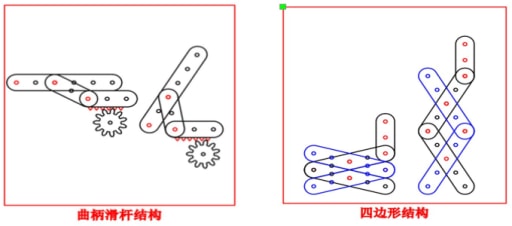
在驗(yàn)證時(shí)發(fā)現(xiàn)調(diào)試過程繁瑣,還具有很強(qiáng)的不穩(wěn)定性,隨之改成最簡(jiǎn)潔的拉繩杠桿結(jié)構(gòu)。
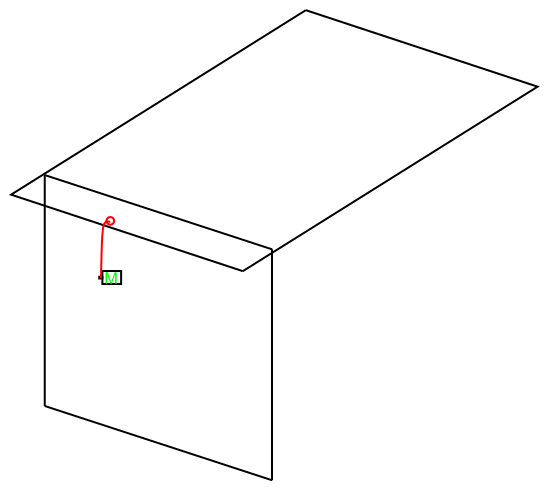
設(shè)計(jì)好結(jié)構(gòu)我們?cè)龠M(jìn)一步的分析,我們可以得到以下信息:
1. 垃圾桶的主體結(jié)構(gòu)為長(zhǎng)柱型,所以我們可以使用盒子設(shè)計(jì)功能快速得到主體結(jié)構(gòu);
2.? 考慮到蓋子需要通過繩子拉動(dòng),所以我們要生成帶軸的盒子;
3. 需要給舵機(jī)、傳感器及智能硬件設(shè)計(jì)放置位。
步驟三: 厘清思路,列出繪圖步驟
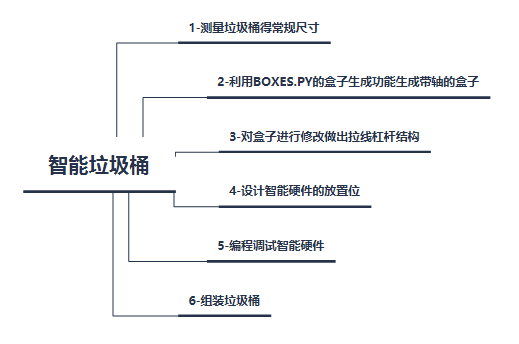
使用“思維導(dǎo)圖”列出繪圖步驟,協(xié)助我們厘清思路。
步驟四: 打開軟件,動(dòng)手繪圖
在厘清思路,列出步驟后,我們開始動(dòng)手繪制圖紙了,這里大家需要注意以下四點(diǎn):
1. 在生成盒子過程中記得輸入激光補(bǔ)償值,可以避免組裝過程中卡口過于松垮,難以安裝的情況;
2. 在設(shè)計(jì)的過程中要提前測(cè)量好智能硬件的大小;
3. 要實(shí)際考慮舵機(jī)可以帶動(dòng)多重的蓋子,適當(dāng)?shù)挠苗U空和其他材料減輕重量;
4. 桶身處可適當(dāng)添加設(shè)計(jì)元素,美化外觀。
步驟五: 編寫程序
1. 確立邏輯,當(dāng)運(yùn)動(dòng)傳感器識(shí)別到人時(shí),舵機(jī)向順時(shí)針方向旋轉(zhuǎn)120°,停留5秒,當(dāng)運(yùn)動(dòng)傳感器沒識(shí)別到人時(shí),舵機(jī)向逆時(shí)針方向旋轉(zhuǎn)120°,停留2秒;
2. 打開編程軟件,按邏輯進(jìn)行編程;
3.? ?配合硬件進(jìn)行測(cè)試。

Done!Perfect!




{kind=link}